“Точные движения во время ходьбы и танцев”
В этой статье мы рассмотрим тему, которая вызывает немало вопросов у создателей роботов - как узнать, собрали ли они своих роботов правильно. Но сначала, что такое калибровка?
Калибровка - это сравнение полученных значений со стандартом.
В нашем случае это “калибровка 4-х сервоприводов”.
Если вы понимаете это определение, то заметите, что вам НЕ нужно калибрировать своего Отто, чтобы он функционировал должным образом, потому что калибровка ТРЕБУЕТСЯ только для точных движений, таких как, допустим, “прямая ходьба” или стояние на одной ноге без падения (поэтому это весьма опционально).
Многие создатели Отто думают, что им нужно калибровать своего робота, потому что после сборки робота они видят, что у Отто ноги и/или ступни находятся в неправильном положении или он ходит странно.
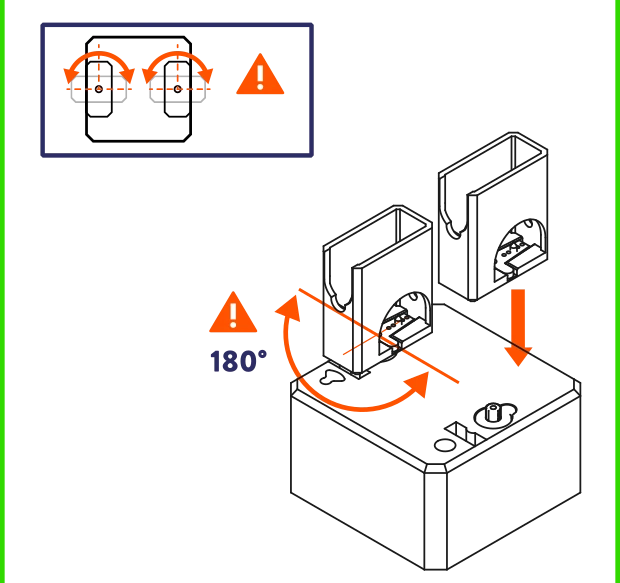
Отто часто использует сервоприводы с углом вращения 180 градусов, что означает, что механически ограничено вращение (тип привода указан в описании к товару и если мы не хотим, чтобы ноги Отто вращались, как колеса, то надо купить с пометкой 180, но если мы не боимся сложностей - то покупайте 360 градусов).
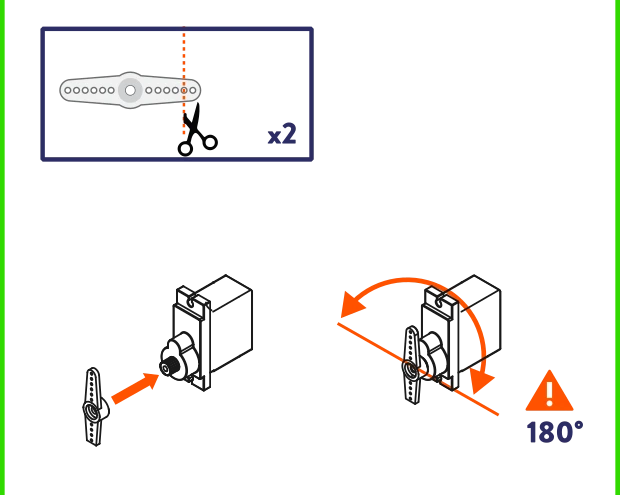
Если вы посмотрите на изображение выше, вы должны удостовериться, что сервопривод находится в правильно выровненном положении, в середине 180-градусного вращения, что равно 90 градусам. Не обязательно быть слишком точными на этом этапе, допустимо отклонение в 6 градусов (работает в диапазоне 87-93 градусов), но крайне важно установить белый рычаг с винтом только тогда, когда вы уверены, что сервопривод выровнен (близко к 90 градусам).
То же самое применяется к ногам и к металлическим сервоприводам Отто PLUS.
Попробуйте! И сейчас, вероятно, вы обнаружите, что Отто ходит и танцует довольно хорошо, и остальная часть этой статьи больше не имеет значения!
Я калибровал Отто только раз, потому что при правильной сборке калибровка не требуется. Однако роботы - это точные машины, и иногда сервоприводы начинают проявлять случайные движения из-за длительной эксплуатации, что означает, что нам придется электронно калибровать сервоприводы, чтобы “обнулить” их положение.
В этом видео мы рассмотрим, как можно убедиться, что ваши сервоприводы калиброваны:
VIDEO
Поскольку у нас есть много способов программирования Отто, вы узнаете, что калибровка осуществляется разными способами, некоторые более сложные, чем другие:
- Otto Blockly
- Ардуино-код вручную (путем регулировки и итерации значений TRIM)
- Ардуино-код через серийный монитор (помощь в итерации значений и сохранении в памяти EEPROM)
В этой статье мы сосредоточимся на способе Otto Blockly, так как он наиболее прост для большинства начинающих строителей:
**Калибровка Отто с помощью Otto Blockly **
Blockly - это язык программирования JavaScript, предназначенный для создания визуальных языков программирования на основе блоков и редакторов. Этот проект Google является бесплатным и свободным программным обеспечением.
Мы создали собственное программное обеспечение на основе Blockly, которое позволяет генерировать код Arduino для компиляции и загрузки на Отто.
Скачать Otto Blockly можно тут.
Прежде чем начать, убедитесь, что сервоприводы подключены к правильным портам: 4, 3, 2, 1.
Установите и Откройте программу Otto Blockly.
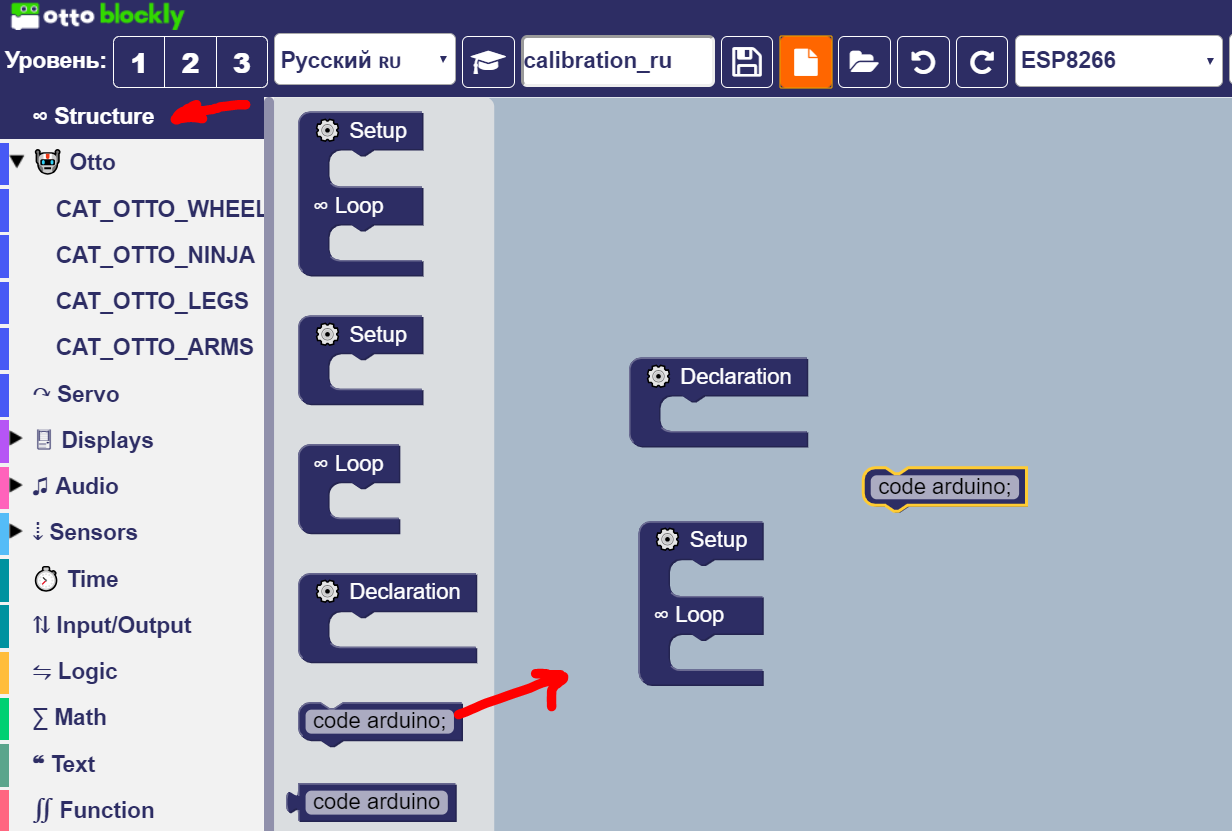
**Шаг 1:** Нажмите Новый в верхнем меню:
**Шаг 2:** Перенесите из левого меню Structure три элемента:
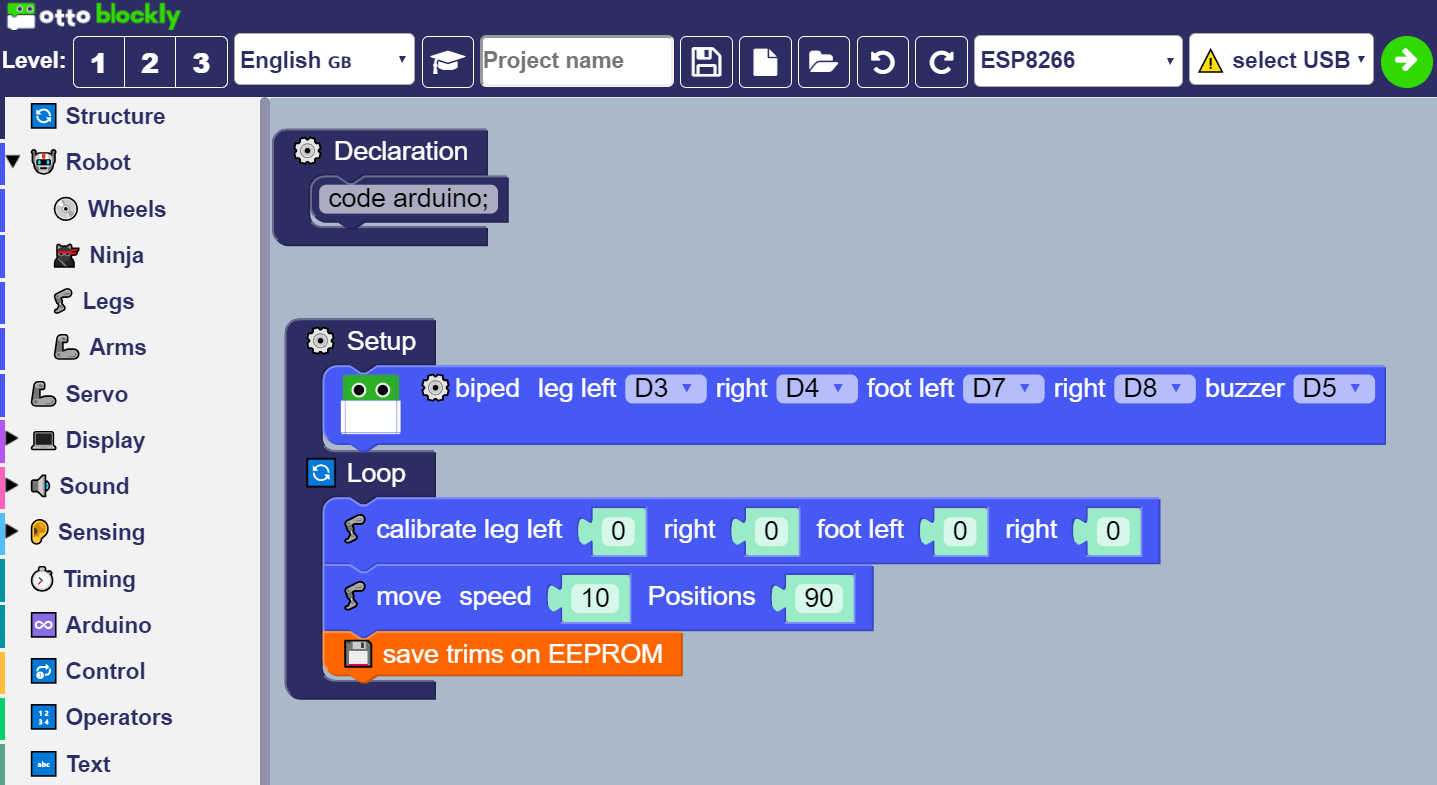
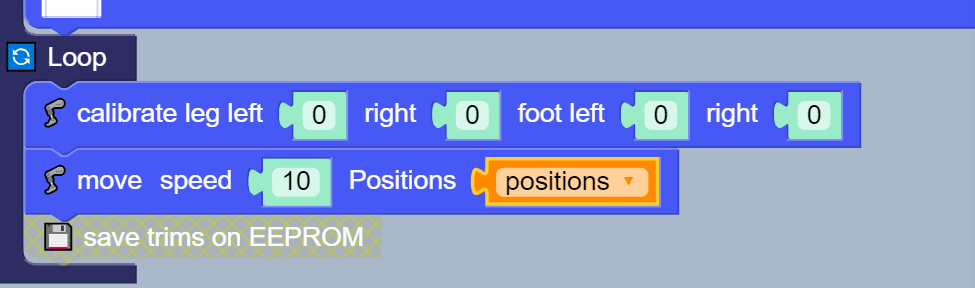
**Шаг 3:** Переключите язык на English и перенесите из подменю Robot -> Legs элементы Calibrate, Move, Biped и расставьте как на картинке ниже:
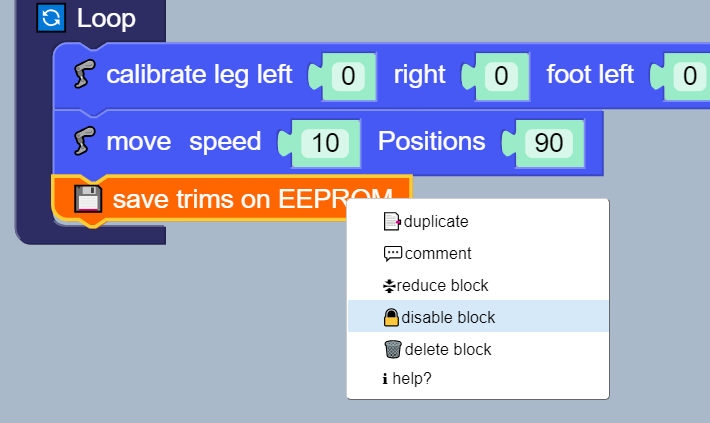
**Шаг 4:** Добавьте блок saveTRIMSOnEEPROM и отключите его:
Щелкните правой кнопкой мыши по блоку и выберите “Disable block”
Выставите D4, D3, D2, D1 как на примере.
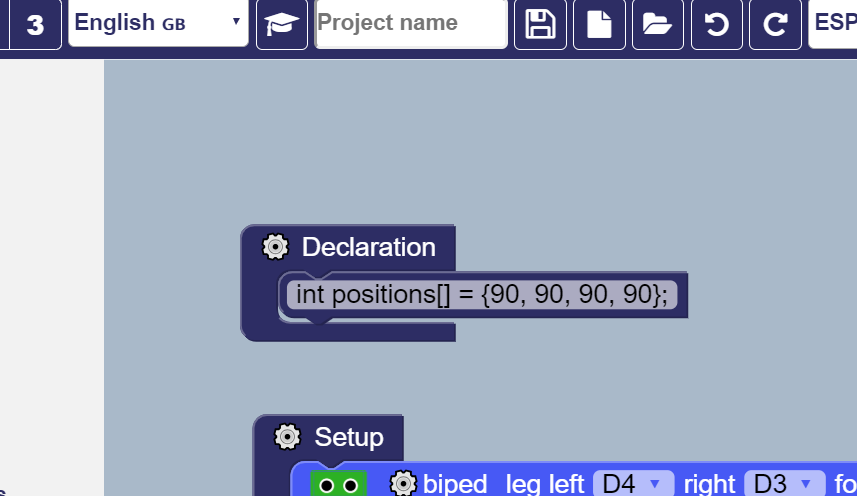
**Шаг 5:** Прописываем в Declaration значения углов сервоприводов:
вместо code arduino; вбиваем int positions[]={90,90,90,90};
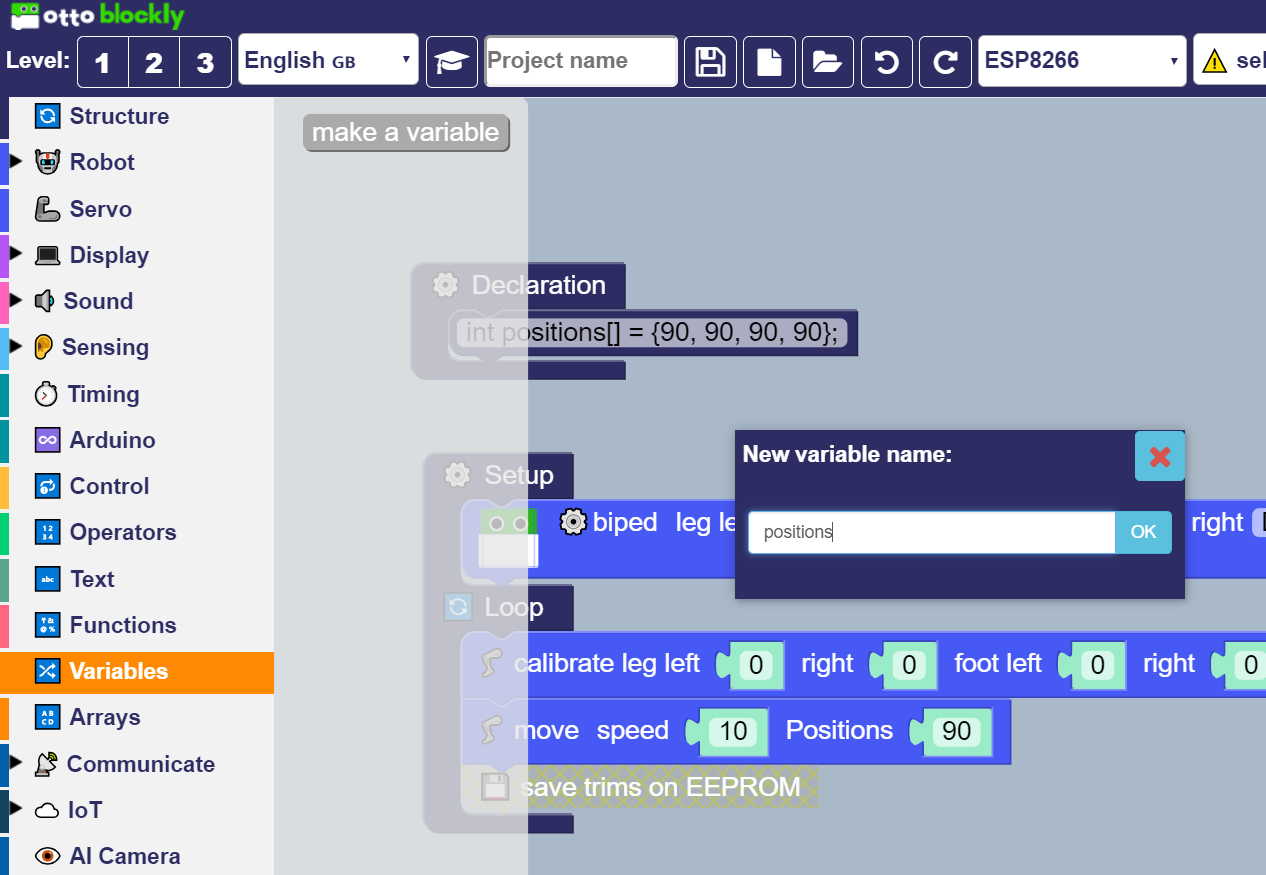
создаём переменную positions
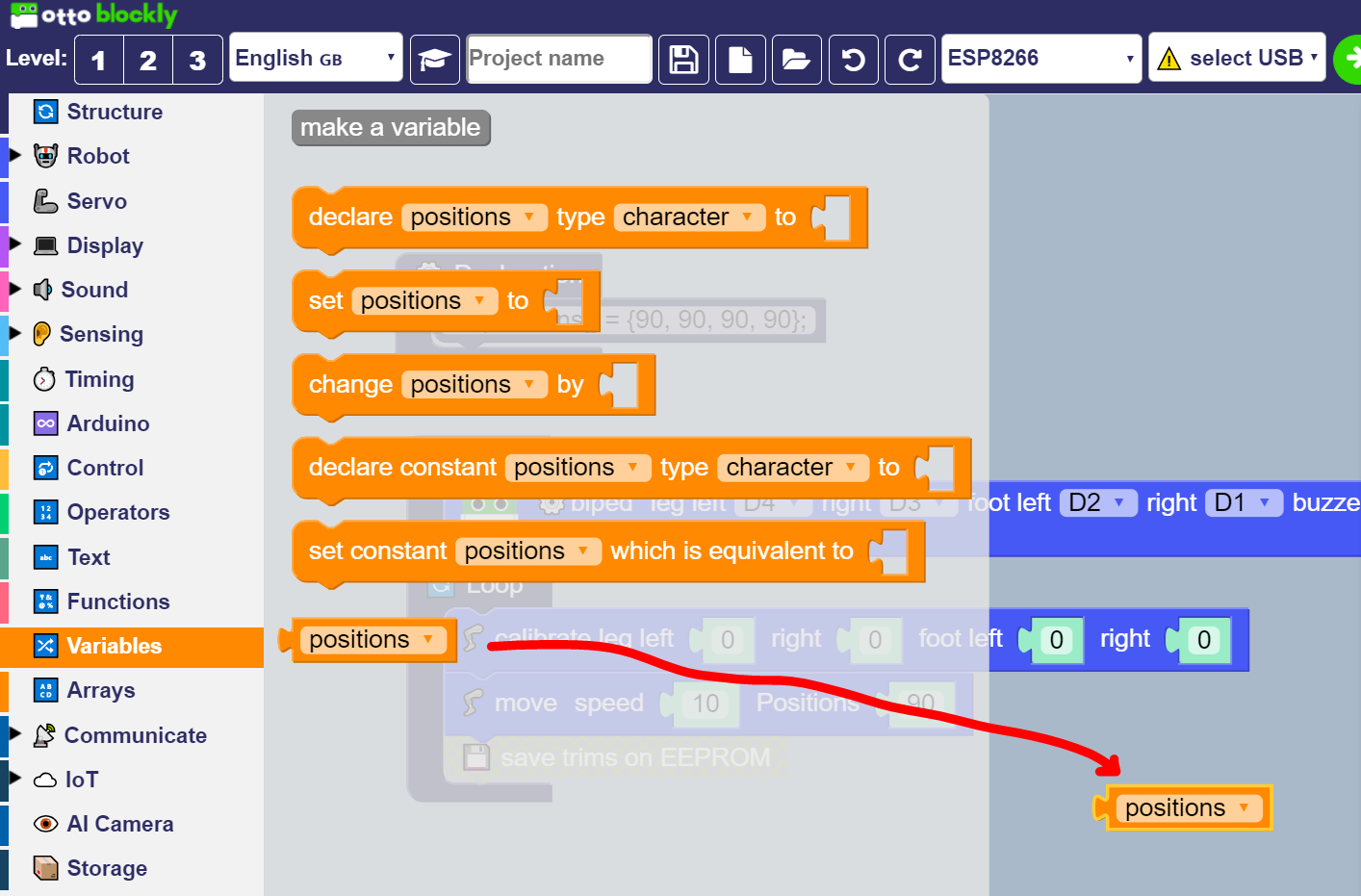
переносим блок с переменной
размещаем в соответствующем поле внутри блока Move
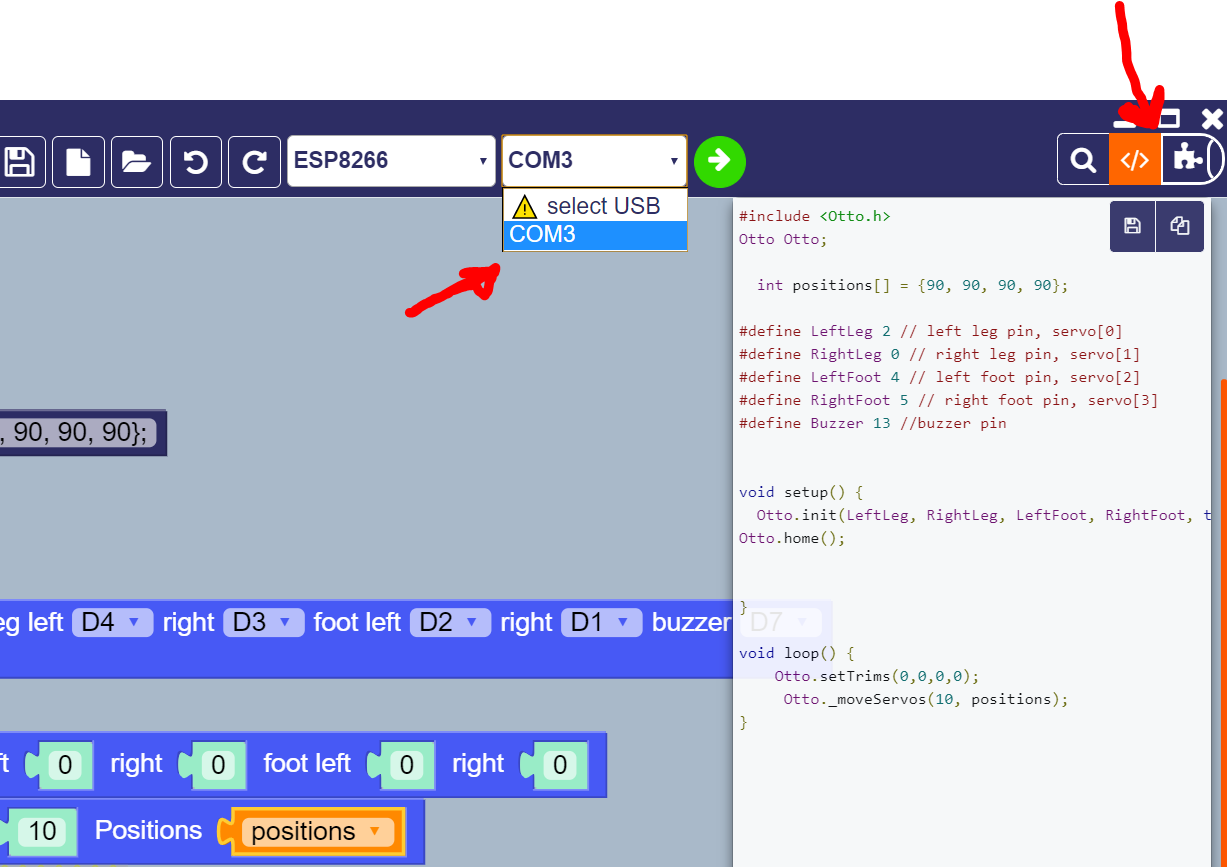
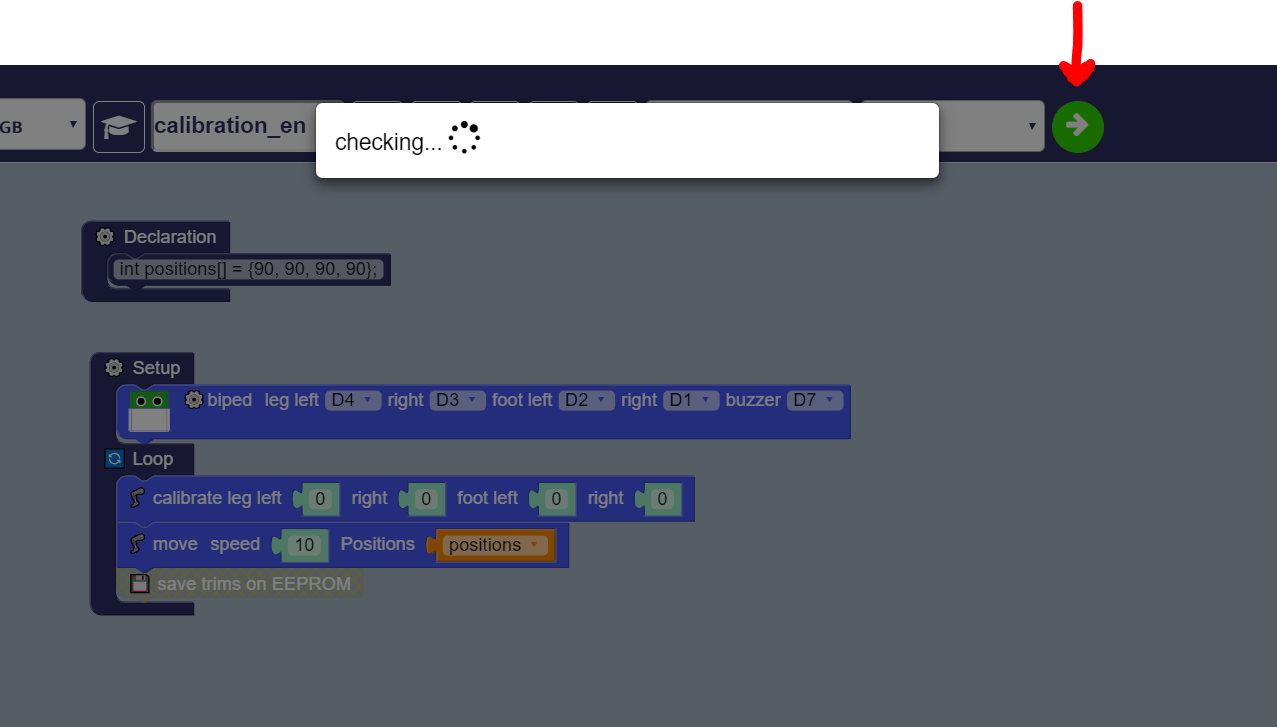
**Шаг 6:** Загружаем код:
Вверху справа есть кнопка Arduino code preview. Этот код будет работать и в Arduino IDE.
Нажмите на кнопку Upload code -
Вы увидите, что Отто переместится в позу и встанет. Проанализируйте текущее положение его ног и ступней. Какие из них находятся в неправильном положении?
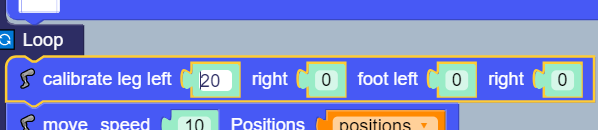
**Шаг 7:** Изменяйте значения для каждого сервопривода (ноги или ступни)
В зависимости от вашего робота вам придется постоянно изменять значения с небольшими приращениями или убываниями (-20 до 20) для ног или ступней, которые находятся в неправильном положении.
затем,
Повторяйте до тех пор, пока не добьетесь практически идеального положения.
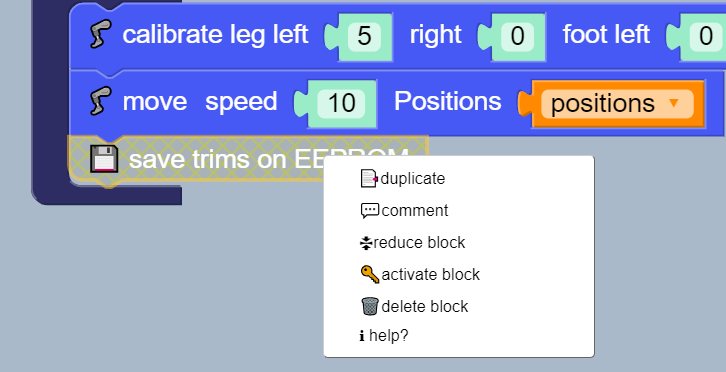
**Шаг 8:** Активируйте блок “saveTRIMSOnEEPROM”
Щелкните правой кнопкой мыши по блоку и выберите “activete block”
**Шаг 9:** Проверьте и загрузите код на плату в последний раз
После успешной загрузки программы ваш Отто полностью откалиброван, даже в памяти EEPROM, поэтому вам не придется делать это снова для этого конкретного робота.
При возникновении проблем, вы можете скачать готовый файл калибровки по ссылке ниже
ссылка
Видео Урок с шагами по этому:
VIDEO